Section11.3Méthode parcimonieuse pour l'apprentissage d'ODE
Apprendre une ODE par réseau de neurones peut être très efficace cependant il s'agit d'une méthode peu explicative. En effet on ne connait la forme de l'équation différentielle. Ici on va introduire une méthode permettant de construire une ODE nonlinéaire à partir de données ou la forme est explicitement connue.
Subsection11.3.1méthode SINdy
Le problème est ici le même que précédemment. On se donne des données \(\left\{x(t_1),..,x(t_n)\right\}\) avec \(x(t)\in\mathbb{R}^q\) qui correspond a une dynamique temporelle et on cherche une ODE du type:
avec \(\sigma\) et \(\beta\) des paramètres physiques.
A travers ses exemples et un certains nombres d'autres, on peut voir que les nonlinearités sont assez simple. Il va souvent s'agir de nonlinéarité cubique et quadratique ou issu de fonctions classiques. L'idée de l'approcge SINDy part de ce principe.
L'approche SINDy consiste a proposer comme fonction paramétrique et combinaison linéaire de nonlinéarité qu'on se donne en avance.
Modèle paramétrique de l'approche SINDy.
On se donne un certains nombre de fonction \((f_1(x),....,f_m(x))\text{.}\) Le modèle paramétrique utilisé dans l'approche SINDy est donnée par
avec comme paramètres \(\boldsymbol{\xi}=(\xi_1,....\xi_m)\)
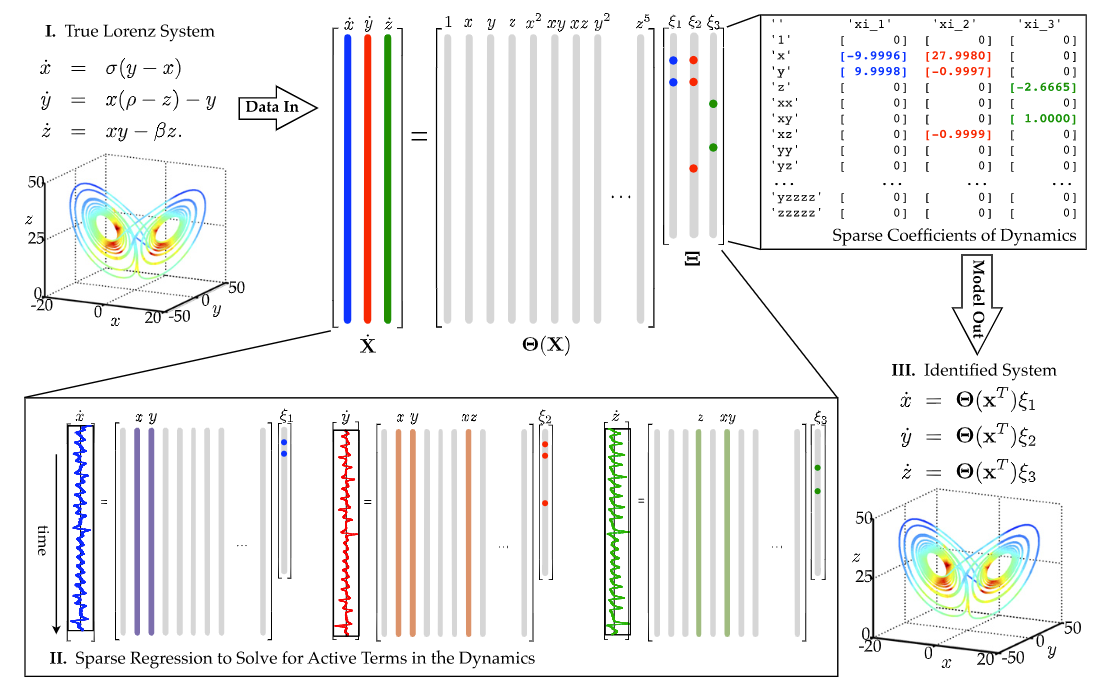
A partir du moment ou on utilise ce type de représentation, la construction des coefficients peut se réaliser avec une régression linéaire sur des entrées qui sont obtenues en appliquant les nonlinearités aux données d'origine. Afin que le système soit le plus interprétable et le plus simple possible on va chercher la répresentation la parcimonieuse possible. On va maintenant formaliser cela. On commence par introduire la matrice des données:
Lorsqu'on note \(f_1(\mathbf{X})\) il s'agit du vecteur contenant la nonlinarité pour chaque donnée en temps. Les nonlinearités seront du type \(x_1^2\text{,}\)\(x_1x_2...x_d\text{,}\)\(sin(x_4)\) etc.
Définition11.3.Problème de minimisation de la méthode SINDy.
La méthode SINDy revient a minimiser le problème suivant: