Section 2.3 Rappels sur la géométrie différentielle
L'enjeu des méthodes que l'ont va introduire par la suite est de comprendre/capturer la variété qui explique l'échantillon des données. Pour représenter une variété au niveau discret, la notion de graphe apparaît très vite. On va donc introduire des rappels sur ces objets.
Subsection 2.3.1 Géométrie différentielle
La 1ère notion est celle de variété qui généralise les courbes et surfaces. Soit \(\mathcal{M}\) un espace topologique séparé a base dénombrable est variété de dimension \(d\) si avec \(\phi_x\) un homéomorphisme, et \(V\) un ouvert.
Définition 2.10. Variété topologique.
Définition 2.11. Carte et atlas.
Soit une variété \(\mathcal{M}\text{,}\) on appelle le couple \((U_x,\phi_x)\) Une carte locale de la variété. Soit \((U_i,\phi_i)\)$ une famille de carte locale qui recouvre la variété en entier, on la nomme atlas noté \(\mathcal{A}_{\mathcal{M}}\text{.}\)
La notion de carte local permet donc de décrirer localement une variété a partir d'un espace vectoriel. L'altas est l'objet qui permet de rendre compte de l'ensemble des propriétés de la variétés.
Définition 2.12. Atlas \(C^k\).
Pour tout \((i,j)\) tel que \(U_j \cap U_i \neq \emptyset\text{,}\) si l'application de changement de carte
est un difféomorphisme de classe \(C^k\text{.}\) On parle d'atlas lisse si il est \(C^{\infty}\text{.}\)
La carte locale permet d'associer a tout \(x \in\mathcal{M}\) un point \(y\in\mathbb{R}^n\) cependant cette représentation appelée coordonnées locale peut ne pas être unique notamment si on a \(U_j \cap U_i \neq \emptyset\text{.}\) L'application de changement de carte permet de passer d'une coordonnées locale à une autre. On appelle \(\phi^{-1}\) une paramètrisation locale.
Définition 2.13.
Deux atlas \(C^k\) sont dits compatible si leur réunion reste une atlas \(C^k\text{.}\) Cette notion de compatibilité forme une relation d'équivalence.
Définition 2.14. Variété différentielle.
Une variété différentiable (de classe \(C^k\)) est une paire \((\mathcal{M},\Sigma)\) où \(\mathcal{M}\) est une sous variété et est \(\Sigma\) une classe d’équivalence d’atlas \(C^k\text{.}\)
Définition 2.15. Sous Variété (extrasèque).
Soit \(\mathcal{M}\) une variété topologique, elle est une sous variété de dimension \(d\) de \(\mathbb{R}^n\) si l'une de ses définitions équivalentes est vérifiée:
-
Par redréssement: \(\forall x \in \mathcal{M}\text{,}\) il existe un voisinage \(U\) de \(x\) dans \(\mathbb{R}^n\text{,}\) un voisinage \(V\) de \(0\) dans \(\mathbb{R}^d\) et un difféomorphisme
\begin{equation*} \phi: U \rightarrow V \end{equation*}de classe \(C^k\) tels que \(\phi(U \cap M)=V \cap\left(\mathbb{R}^p \times\{0\}\right)\) avec \(\mathbb{R}^p \times\{0\}=\left\{ x\in \mathbb{R}^n, x^{p+1}=....=x^n=0\right\}\text{.}\)
-
Par paramétrage: \(\forall x \in \mathcal{M}\text{,}\) il existe un voisinage \(U\) de \(x\) dans \(\mathbb{R}^n\text{,}\) un voisinage \(V\) de \(0\) dans \(\mathbb{R}^d\)et une application de classe \(C^k\)
\begin{equation*} f: V \rightarrow \mathbb{R}^n$ de classe $\mathrm{C}^k \end{equation*}tels que \(f(0)=x\text{,}\) et \(df\) en \(0\) est injective (on parle d'immersion), et \(f\) soit un homéomorphisme de \(V\) sur \(U\cap \mathcal{M}\text{.}\)
La première définition La dernière définition (par redressement) signifie qu'une partie \(\mathcal{M}\) de \(\mathbb{R}^n\) est une sous-variété de dimension \(d\) si on peut tordre le voisinage de chacun de ses points de sorte que \(\mathcal{M}\) soit envoyé sur un morceau d’un sous-espace de dimension \(d\text{.}\) Il s'agit de l'équivalent de la définition d'une variété avec les cartes locales pour les sous variétés. On va donner quelques exemples:
Variété en dimension 1: on parle de courbe régulière. Les variétés de dimension un sont difféomorphe à la sphère \(\mathbb{S}^1\) ou à la droite réelle \(\mathbb{R}\text{.}\) Les coniques sont des variétés en dimension un.
Variété en dimension 2: la sphère \(\mathbb{S}^2\text{,}\) le tore \(\mathbf{T}^2\) et les surfaces à \(n\) trous.
La notion de fonction différentiable sur un variété découle assez naturellement des définitions précédentes.
Définition 2.16. Courbe paramètrique sur une variété.
Une courbe paramètrée sur une variété est une application de \(\gamma: I\in \mathbb{R}\rightarrow \mathcal{M}\text{.}\) Son expression dans la carte locale \(\phi_x:U_x \rightarrow \mathbb{R}^n\) s'écrit
avec \(\tilde{\gamma}(t)=(y_1(t),...,y_n(t))=\phi_x(\gamma(t))\text{.}\) \((y_1(t),...,y_n(t))\) forment les coordonnées locales des points de la courbe paramètrée. Cette courbe est dite régulière si sont expression locale est régulière en \(t\text{.}\)
La vitesse d'une courbe paramètré \(\gamma(t)\) en \(\gamma(0)=x\in \mathcal{M}\) ou elle est régulière devrait correspondre au vecteur tangent à la courbe en \(x\text{.}\) On le notérait \(\gamma^{'}(0)\text{.}\) A ce stade la on ne connait l'espace dans lequel pourrait vivre ce vecteur. Dans le cas de la géométrie extrasèque ou on considère que des sous variétés de \(\mathbb{R}^n\) il est plus facile de définir cela. On va se restreindre à ce cas.
Définition 2.17. Vecteur Tangent (extrasèque).
Soient \(q \leq n\) dans \(\mathbb{N}\text{,}\) \(\mathcal{M}\) une sous-variété de \(\mathbb{R}^n\) de classe \(C^1\) et de dimension \(p\text{,}\) et \(x\) un point de \(\mathcal{M}\text{:}\) Un vecteur \(v \in \mathbb{R}^n\) est dit tangent à \(\mathcal{M}\) en \(x\) s'il existe un intervalle ouvert \(I\) contenant 0 et une courbe \(\gamma(t): I \rightarrow \mathbb{R}^n\) de classe \(>\mathrm{C}^1\text{,}\) à valeurs dans \(\mathcal{M}\text{,}\) telle que

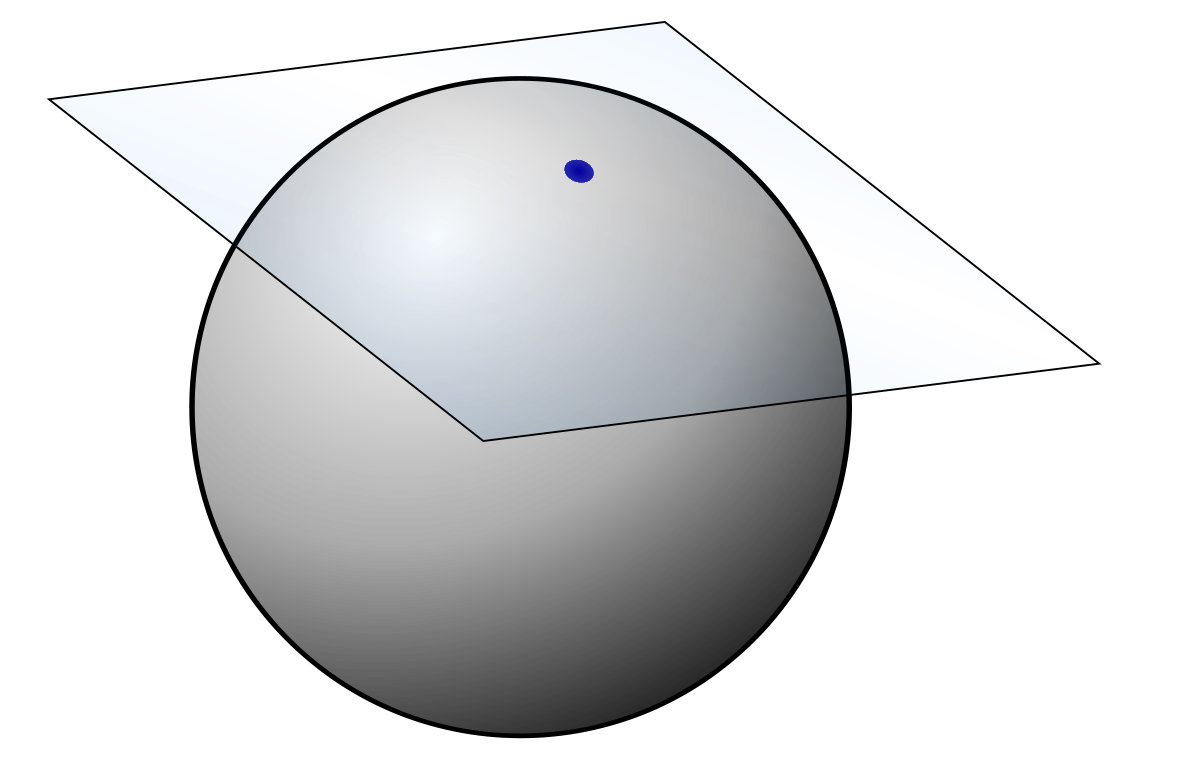
Définition 2.19. Espace Tangent (extrasèque).
Soit \(\mathcal{M}\) une sous variété, un espace \(T_x \mathcal{M}\) est l'ensemble des vecteurs tangents.
Proposition 2.20.
En utilisant les caractérisation des sous variétés de \(\mathbb{R}^n\) on peut caractériser l'espace tangent par
-
Si \(U\) est un voisinage ouvert de \(x\) dans \(\mathbb{R}^n\text{,}\) si \(V\) est un voisinage ouvert de 0 dans \(\mathbb{R}^n\) et \(f: U \rightarrow\) \(V\) un \(\mathrm{C}^1\)-difféomorphisme tels que \(f(x)=0\) et \((U \cap M)=V \cap\left(\mathbb{R}^p \times\{0\}\right)\text{,}\) alors
\begin{equation*} T_x M=d f_x^{-1}\left(\mathbb{R}^p \times\{0\}\right) \end{equation*} -
Si \(U\) est un voisinage ouvert de \(x\) dans \(\mathbb{R}^n\text{,}\) si \(V\) est un voisinage ouvert de 0 dans \(\mathbb{R}^n\) et \(f(0)=x\text{,}\) est un paramétrage local \(\mathrm{C}^1\) de \(U\cap M\) en \(x\text{,}\) alors
\begin{equation*} T_x M=\operatorname{Im} d f_0 \end{equation*}
L'espace tangent en un point \(x\) d'une variété différentielle \(\mathcal{M}\) est un espace vectoriel qui intuitivement est l'ensemble de tous les vecteurs-vitesse possibles (vecteur tangent) d'un objet se déplaçant dans la variété \(\mathcal{M}\) quand il est en \(x\text{.}\)
Proposition 2.21.
L'espace tangent ne depend pas du choix de la carte locale.
Preuve.
On se donne deux cartes locales \(\phi,\psi\) en \(x\text{.}\) Dans ce cas l'image de \(\mathbb{R}^p \times\{0\}\) par \(\phi\circ \psi^{-1}\) est \(\mathbb{R}^p \times\{0\}\text{.}\) Cest aussi le cas pour la différentielle de l'application \(\phi\circ \psi^{-1}\text{.}\) On a donc
et donc
Définition 2.22. Espace Fibré tangent.
L'ensemble des espace tangents associé a une variété \(\mathcal{M}\) de dimension \(p\) est noté
Il s'agit d'un espace vectoriel de dimension \(2 p\text{.}\) On parle \(d'espace fibré tangent\text{.}\)
Définition 2.24.
Un champ de vecteur sur \(\mathcal{M}\) est un choix de vecteur tangent en chaque point :
On note \(C^{\infty}(\mathcal{M} ; T \mathcal{M})\) est l'ensemble des champs de vecteur \(C^{\infty}\) sur \(\mathcal{M}\text{.}\)
Définition 2.25. Fonction différentiable sur une variété.
Une fonction \(f: \mathcal{M}\rightarrow\mathcal{N}\) avec \(\mathcal{M},\mathcal{N}\) deux variétés différentielles \(C^k\) est dite \(C^l\) avec \(l \lt k\) siLa régularité demandées des applications de changements de carte assure que les fonctions \(f_{\phi_x,\phi_y}\) seront toujours régulières. Ici on a donc définit la régularité d'une fonction sur une variété en utilisant la régularité d'une fonction de \(\mathbb{R}^{\dim \mathcal{M}}\) dans \(\mathbb{R}^{dim \mathcal{N}}\) que l'on sait parfaitement définir à l'aide des cartes locales qui utilisent la représentation locale de la variété dans les espaces Euclidien. Pour finir on souhaite introduire ces notions généralisant la différentielle.
Définition 2.26. Différentielle d'une application.
to DOOO:
Subsection 2.3.2 Variété Riemannienne
Maintenant les notions générales de variétés sont introduites opn va se focaliser sur une sous classe de variétés appelée les variétés Riemanienne ainsi que certaines notions associées. Ce sont ce type de variété qu'on va regarder dans nos applications. Les variétés Riemaniennes sont des variétés auxquelles on peut adjoindre une notion de métrique.
Une métrique Riemannienne sur une variété lisse \(\mathcal{M}\) est une application continue \(g\) de \(\mathcal{M}\) dans l’ensemble des formes bilinéaires symétriques et définies positives sur les espaces tangent \(T_x \mathcal{M}\text{.}\) Autrement dit, \(g\) associe à un point \(x\) de \(\mathcal{M}\) un produit scalaire de \(T_x \mathcal{M}\text{.}\)
Définition 2.27. Métrique Riemannienne.
avec \(\langle.,. \rangle_{T_x \mathcal{M}}:T_x \mathcal{M}\times T_x \mathcal{M}\rightarrow \mathbf{R}\) un produit scalaire.
Définition 2.28. Variété Riemannienne.
Un couple \((\mathcal{M},g)\) est appelée >Variété Riemannienne.
Cela revient à dire que l'ensemble des espace tangents à la variété ont une structure euclidienne et sont munis d'un produit scalaire et donc de la notion de distance associée. Notamment sur une variété Riemannienne, si \(t\) et \(t^{'}\) sont deux vecteurs tangents au même point \(x\in \mathcal{M}\text{,}\) on peut parler de leur produit scalaire, de leurs longueurs et de leur angle. Soit \((\mathcal{M},g_m)\) et \((\mathcal{N},g_n)\) deux variétés Riemanniennes. Un difféomorphisme \(\phi: \mathcal{M}\rightarrow \mathcal{N}\) est une isométrie si et ssi: Les variétés Riemanniennes sont isométriques si il existe une isométrie.
Définition 2.29.